上篇总结了 Model-Free Predict 问题及方法,本文内容介绍 Model-Free Control 方法,即 "Optimise the value function of an unknown MDP"。
在这里说明下,Model-Free Predict/Control 不仅适用于 Model-Free 的情况,其同样适用于 MDP 已知的问题:
- MDP model is unknown, but experience can be sampled.
- MDP model is known, but is too big to use, except by samples.
在正式介绍 Model-Free Control 方法之前,我们先介绍下 On-policy Learning 及 Off-policy Learning。
On-policy Learning vs. Off-policy Learning
On-policy Learning:
- "Learn on the job"
- Learn about policy \(\pi\) from experience sampled from \(\pi\)(即采样的策略与学习的策略一致)
Off-policy Learning:
- "Look over someone's shoulder"
- Learn about policy \(\pi\) from experience sampled from \(\mu\)(即采样的策略与学习的策略不一致)
On-Policy Monte-Carlo Learning
Generalized Policy Iteration
具体的 Control 方法,在《动态规划》一文中我们提到了 Model-based 下的广义策略迭代 GPI 框架,那在 Model-Free 情况下是否同样适用呢?
如下图为 Model-based 下的广义策略迭代 GPI 框架,主要分两部分:策略评估及基于 Greedy 策略的策略提升。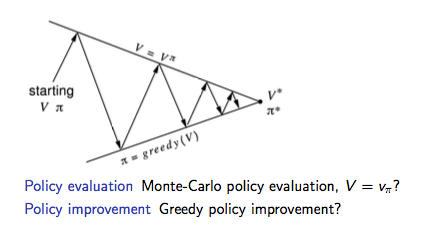
Model-Free 策略评估
在《Model-Free Predict》中我们分别介绍了两种 Model-Free 的策略评估方法:MC 和 TD。我们先讨论使用 MC 情况下的 Model-Free 策略评估。
如上图GPI框架所示:- 基于 \(V(s)\) 的贪婪策略提升需要 MDP 已知:\[\pi'(s) = \arg\max_{a\in A}\Bigl(R_{s}^{a}+P_{ss'}^{a}V(s')\Bigr)\]
- 基于 \(Q(s, a)\) 的贪婪策略提升不需要 MDP 已知,即 Model-Free:\[\pi'(s) = \arg\max_{a\in A}Q(s, a)\]
因此 Model-Free 下需要对 \(Q(s, a)\) 策略评估,整个GPI策略迭代也要基于 \(Q(s, a)\)。
Model-Free 策略提升
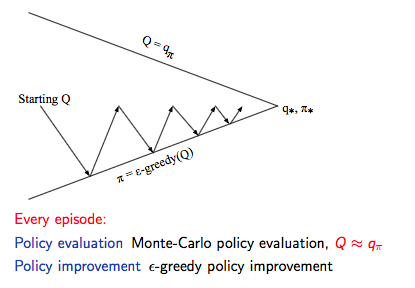
确定了策略评估的对象,那接下来要考虑的就是如何基于策略评估的结果 \(Q(s, a)\) 进行策略提升。
由于 Model-Free 的策略评估基于对经验的 samples(即评估的 \(q(s, a)\) 存在 bias),因此我们在这里不采用纯粹的 greedy 策略,防止因为策略评估的偏差导致整个策略迭代进入局部最优,而是采用具有 explore 功能的 \(\epsilon\)-greedy 算法:\[ \pi(a|s) = \begin{cases} &\frac{\epsilon}{m} + 1 - \epsilon, &\text{if } a^*=\arg\max_{a\in A}Q(s, a)\\ &\frac{\epsilon}{m}, &\text{otherwise} \end{cases} \]因此,我们确定了 Model-Free 下的 Monto-Carlo Control:
GLIE
先直接贴下David的课件,GLIE 介绍如下:
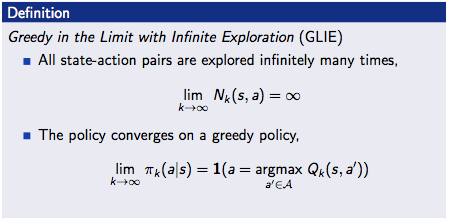
对于 \(\epsilon\)-greedy 算法而言,如果 \(\epsilon\) 随着迭代次数逐步减为0,那么 \(\epsilon\)-greedy 是 GLIE,即:
\[\epsilon_{k} = \frac{1}{k}\]GLIE Monto-Carlo Control
GLIE Monto-Carlo Control:
- 对于 episode 中的每个状态 \(S_{t}\) 和动作 \(A_t\):\[ N(S_t, A_t) ← N(S_t, A_t) + 1 \\ Q(S_t, A_t) ← Q(S_t, A_t) + \frac{1}{N(S_t, A_t)}(G_t - Q(S_t, A_t)) \]
- 基于新的动作价值函数提升策略:\[ \epsilon ← \frac{1}{k}\\ \pi ← \epsilon\text{-greedy}(Q) \]
定理:GLIE Monto-Carlo Control 收敛到最优的动作价值函数,即:\(Q(s, a) → q_*(s, a)\)。
On-Policy Temporal-Difference Learning
Sarsa
我们之前总结过 TD 相对 MC 的优势:
- 低方差
- Online
- 非完整序列
那么一个很自然的想法就是在整个控制闭环中用 TD 代替 MC:
- 使用 TD 来计算 \(Q(S, A)\)
- 仍然使用 \(\epsilon\)-greedy 策略提升
- 每一个 step 进行更新
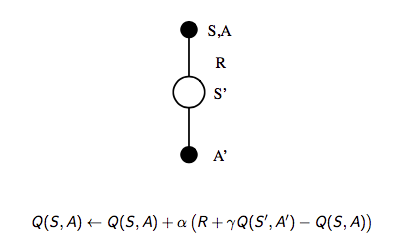
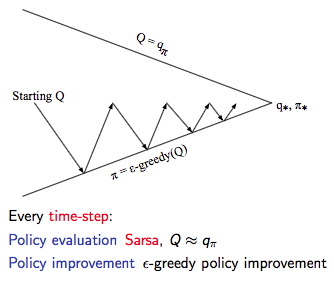
通过上述改变就使得 On-Policy 的蒙特卡洛方法变成了著名的 Sarsa。
- 更新动作价值函数
- Control
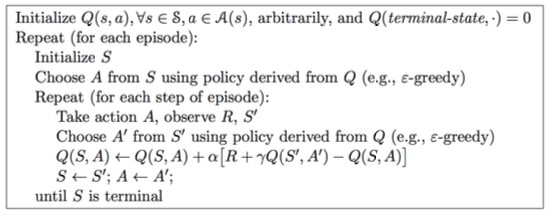
Sarsa算法的伪代码如下:
Sarsa(λ)
n-step Sarsa returns 可以表示如下:
\(n=1\) 时:\(q_{t}^{(1)} = R_{t+1} + \gamma Q(S_{t+1})\)\(n=2\) 时:\(q_{t}^{(2)} = R_{t+1} + \gamma R_{t+2} + \gamma^2 Q(S_{t+2})\) ...\(n=\infty\) 时:\(q_{t}^{\infty} = R_{t+1} + \gamma R_{t+2} + ... + \gamma^{T-1} R_T\) 因此,n-step return \(q_{t}^{(n)} = R_{t+1} + \gamma R_{t+2} + ... + \gamma^{n}Q(S_{t+n})\)n-step Sarsa 更新公式:
\[Q(S_t, A_t) ← Q(S_t, A_t) + \alpha (q_t^{(n)} - Q(S_t, A_t))\]具体的 Sarsa(λ) 算法伪代码如下:
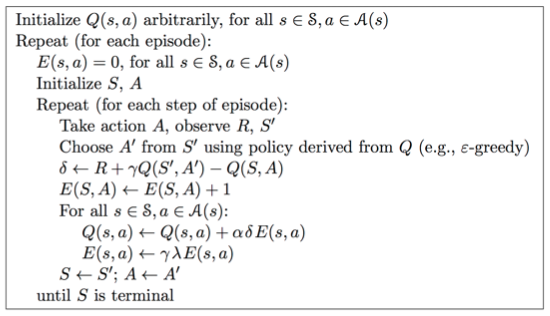
其中 \(E(s, a)\) 为资格迹。
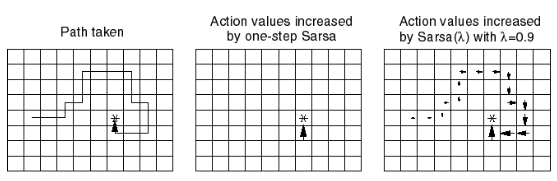
下图为 Sarsa(λ) 用于 Gridworld 例子的示意图:
Off-Policy Learning
Off-Policy Learning 的特点是评估目标策略 \(\pi(a|s)\) 来计算 \(v_{\pi}(s)\) 或者 \(q_{\pi}(s, a)\),但是跟随行为策略 \(\{S_1, A_1, R_2, ..., S_T\}\sim\mu(a|s)\)。
Off-Policy Learning 有什么意义?
- Learn from observing humans or other agents
- Re-use experience generated from old policies \(\pi_1, \pi_2, ..., \pi_{t-1}\)
- Learn about optimal policy while following exploratory policy
- Learn about multiple policies while following one policy
重要性采样
重要性采样的目的是:Estimate the expectation of a different distribution。
\[ \begin{align} E_{X\sim P}[f(X)] &= \sum P(X)f(X)\\ &= \sum Q(X)\frac{P(X)}{Q(X)}f(X)\\ &= E_{X\sim Q}[\frac{P(X)}{Q(X)}f(X)] \end{align} \]Off-Policy MC 重要性采样
使用策略 \(\pi\) 产生的 return 来评估 \(\mu\):
\[G_t^{\pi/\mu} = \frac{\pi(A_t|S_t)}{\mu(A_t|S_t)} \frac{\pi(A_{t+1}|S_{t+1})}{\mu(A_{t+1}|S_{t+1})}...\frac{\pi(A_T|S_T)}{\mu(A_T|S_T)}G_t\]朝着正确的 return 方向去更新价值:
\[V(S_t) ← V(S_t) + \alpha\Bigl(\color{Red}{G_t^{\pi/\mu}}-V(S_t)\Bigr)\]需要注意两点:
- Cannot use if \(\mu\) is zero when \(\pi\) is non-zero
- 重要性采样会显著性地提升方差
Off-Policy TD 重要性采样
TD 是单步的,所以使用策略 \(\pi\) 产生的 TD targets 来评估 \(\mu\):
\[V(S_t) ← V(S_t) + \alpha\Bigl(\frac{\pi(A_t|S_t)}{\mu(A_t|S_t)}(R_{t+1}+\gamma V(S_{t+1}))-V(S_t)\Bigr)\]- 方差比MC版本的重要性采样低很多
Q-Learning
前面分别介绍了对价值函数 \(V(s)\) 进行 off-policy 学习,现在我们讨论如何对动作价值函数 \(Q(s, a)\) 进行 off-policy 学习:
- 不需要重要性采样
- 使用行为策略选出下一步的动作:\(A_{t+1}\sim\mu(·|S_t)\)
- 但是仍需要考虑另一个后继动作:\(A'\sim\pi(·|S_t)\)
- 朝着另一个后继动作的价值更新 \(Q(S_t, A_t)\):\[Q(S_t, A_t) ← Q(S_t, A_t) + \alpha\Bigl(R_{t+1}+\gamma Q(S_{t+1}, A')-Q(S_t, A_t)\Bigr)\]
讨论完对动作价值函数的学习,我们接着看如何通过 Q-Learning 进行 Control:
- 行为策略和目标策略均改进
- 目标策略 \(\pi\) 以greedy方式改进:\[\pi(S_t) = \arg\max_{a'}Q(S_{t+1}, a')\]
- 行为策略 \(\mu\) 以 \(\epsilon\)-greedy 方式改进
- Q-Learning target:\[ \begin{align} &R_{t+1}+\gamma Q(S_{t+1}, A')\\ =&R_{t+1}+\gamma Q\Bigl(S_{t+1}, \arg\max_{a'}Q(S_{t+1}, a')\Bigr)\\ =&R_{t+1}+\max_{a'}\gamma Q(S_{t+1}, a') \end{align} \]
Q-Learning 的 backup tree 如下所示:
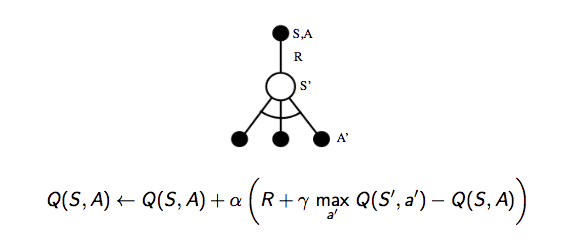
关于 Q-Learning 的结论:
Q-learning control converges to the optimal action-value function, \(Q(s, a)→q_*(s, a)\)
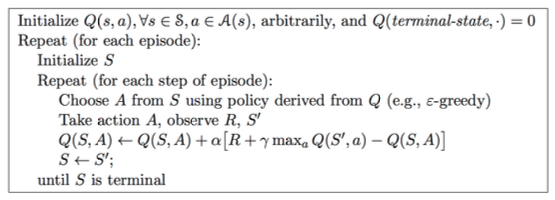
Q-Learning 算法具体的伪代码如下:
对比 Sarsa 与 Q-Learning 可以发现两个最重要的区别:
- TD target 公式不同
- Q-Learning 中下一步的动作从行为策略中选出,而不是目标策略
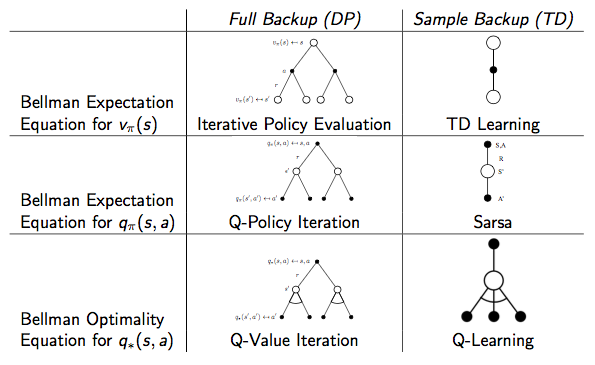
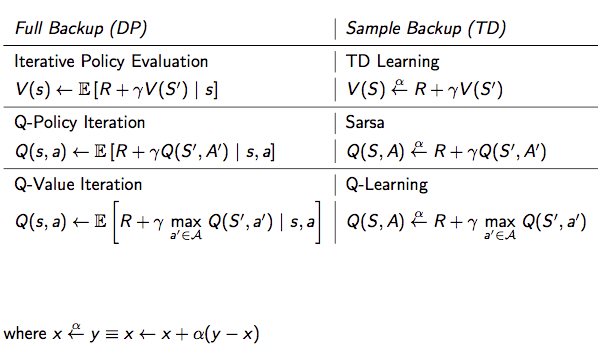
DP vs. TD
两者的区别见下表:
Reference
[1]
[2]